 钻石人生
2020-04-24 10:16:29
钻石人生
2020-04-24 10:16:29
机油压力高报警! 机油压力高报警可不是闹着玩的!毕竟是发动机润滑的直接‘养分’,无论是机油压力高了还是低了,这种异常一旦出现很可能导致发动机跟着遭殃! 最近一台日立ZX330-3g在工作过程中出现机油压力高的现象,机油压力报警灯亮起。机主考虑到机油会直接影响发动机的运转情况,所以决定立即停车检查。
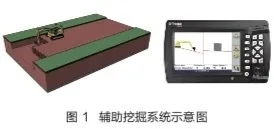
(2)辅助挖掘系统的分类及功能介绍 随着电液技术的发展,辅助挖掘控制系统正沿着从最初的引导式挖掘到半自动辅助挖掘再到全自动辅助挖掘这样一条进化路径快速发展。辅助挖掘机控制系统根据其系统特点可以按照自动化程度及施工维度进行划分。 辅助挖掘控制系统按照自动化程度可以分为电子标线引导式、半自动挖掘机式、全自动挖掘式。电子标线引导式系统简单可靠,成本较低,在一些小型工程上较受欢迎。操作机手需要手动操作挖掘机的工作装置,安装在驾驶室的监控仪表实时显示挖掘机的斗齿位置和实际目标工作位置,通过目标位置和实际的斗齿位置的对比来达到引导挖掘,从而达到辅助挖掘的目的。 半自动以及全自动辅助挖掘控制系统,需要对电液控制系统做出许多适应性改进,系统往往要加装多个工作装置的先导传感器及控制电磁阀,从而达到自动控制挖掘机的动臂、斗杆、铲斗等工作装置的目的,故该系统组成复杂、成本较高,且控制策略及控制算法开发难度大。 目前半自动辅助挖掘控制技术已被美国天宝成功开发,德国MOBA的半自动辅助挖掘也即将面世。总体看,全自动辅助挖掘控制系统还不够成熟,尚处于开发研究阶段。半自动挖掘机相比全自动挖掘,不需要同步控制动臂、斗杆及铲斗等工作装置进行复合动作的工作,需要人工干预斗杆(或者其他工作装置)动作,故该系统较全自动辅助挖掘系统相对简化了许多,现已达到应用阶段。 辅助挖掘控制系统按照施工维度主要分为2D系统和3D系统。电子标线引导式就是典型的2D系统,而半自动辅助挖掘系统和全自动辅助挖掘机系统都属于典型的3D系统。2D辅助挖掘系统分为普通2D系统和进化型2D系统。 普通2D系统仅装有一些角度传感器用于测算挖掘机工作姿态,因此需要工程人员对施工地点进行专业的基准定位及工程放样等辅助施工工作,施工较繁琐,但是成本较低,在一些小型施工工程上应用较多。进化型2D系统通过加装激光接收装置、声纳接收装置、车辆外部的激光仪、声纳发射基站进行位置信息校准(见图2)。由于声纳是基于相对面的计算,施工面的平整度会随相对面产生变化,因此声纳2D系统更适合道路路面的施工。激光2D系统是通过安装在车辆外的激光发送装置和车辆上面的激光接收器,来实现车辆位置计算。激光定位是绝对平面定位,故更适合修坡和沟渠施工。

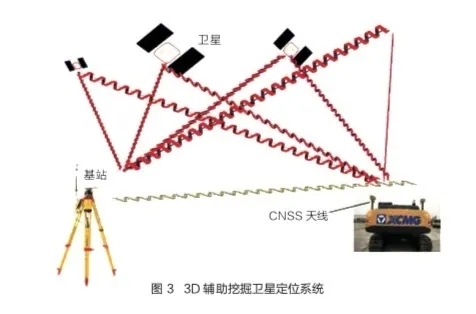
3D辅助挖掘控制系统在2D系统的基础上进化而来。3D系统根据定位源分为卫星定位系统及激光(或者可见光束)定位系统。卫星定位系统(见图3)适合用在较开阔的施工区域,它要求该区域定位卫星信号强度能满足定位要求。此系统根据挖掘机上卫星信号GNSS接收器和外部基站上的GNSS卫星接收器,接受卫星定位信息,从而获取位置信息。同时系统通过加装在挖掘机上车两个不同位置的多个卫星定位器,利用RTK(Real-timekinematic)实时动态载波相位技术实现差分位置计算,实时计算出车辆在施工区域的位置坐标。然后系统结合挖掘机的位置姿态,根据预先导入系统的工程图,可以实时动态确定施工目标位置。
3.辅助挖掘控制技术的发展展望 在当今这个竞争激烈的施工领域,辅助挖掘控制系统可以提供一种更智能化、更快捷的创新施工方案,可帮助工程承包者以最快的速度、最高的工程产品质量完成施工工作。液压挖掘机搭载此系统后将达到事半功倍的施工效果。但是由于目前能够掌握辅助挖掘控制核心技术的厂家很少,因此系统价格较高,在国内市场上还不能大范围应用。 现阶段辅助挖掘机系统主要依靠在后端市场进行改装。主机厂商由于市场尚不成熟且系统成本较高,均未提供此系统的配置。要实现辅助挖掘控制系统的广泛应用,必须突破技术及成本的束缚。徐工作为国内领先的挖掘机制造商,已率先寻求与美国天宝、德国摩巴等业界领先的厂家进行了技术合作,通过技术引进及二次开发实现对产品技术的转化。新合作开发的辅助挖掘系统由于省去了额外的控制器和显示器,因而实现了对系统成本的优化,这一举措将对大力推广辅助挖掘系统提供有力的支持。 目前3D辅助挖掘系统的半自动系统已成功开发和应用,全自动的3D辅助挖掘控制系统也在紧锣密鼓的研究当中,相信不久的将来,随着国内外各大主机厂及配套厂的介入,辅助挖掘机系统将会得到较快的发展。












最新评论